#개발과정 #NodeJS #버튜버
1. VMC 프로토콜
대략적으로 설명하자면, VMC프로토콜이란 모션캡쳐 데이터를 여러 소프트웨어 간에 전달할 수 있는 프로토콜입니다. TDPT, Webcam Motion Capture, VSeeFace, 심지어 블렌더까지 다양한 소프트웨어에서 지원을 하는데요.
저 같은 경우에는 아이폰 버전 TDPT의 보다 자연스러운 데이터를 전신 모션캡쳐에 사용했고, Webcam Motion Capture의 표정, 손가락 캡쳐 데이터를 추가로 사용했어요. 두 신호를 믹스하는 것은 VSeeFace에서 처리했습니다. VSeeFace에서 보조 신호를 받을 수 있어서, 부위별로 신호들을 섞을 수 있거든요.
자, 여기까지 간다면 일반 버튜버-적인 설명이겠지요. 이걸로 끝이었으면 제가 이 포스트를 적고 있지도 않았을 겁니다.
따라서 포트 관련 셋팅은 다 되어있다고 가정하고 이야기할 겁니다!!
2. 모티베이션
저는 조금 더 높은 퀄리티의 모션캡쳐를 위해 여러 가지를 알아보고 있었습니다.
- 일반 모션캡쳐 수트: 가격은 둘째치고 살부터 빼야 합니다...
- 저렴이 모션캡쳐 수트: 15분-30분에 한번씩 칼리브레이션을 해줘야 하고 중요한 손가락과 표정 캡쳐를 위해서라면 어차피 광학적 캡쳐를 해야 합니다.
- 광학-AI 방식: 제가 지금 하고 있는 것인데 일반적인 모노캠 방식은 당연히 한계가 있습니다.
- 듀얼캠-AI 방식: Rokoko 에서 지원하는 것인데, 돈이 드는 건 둘째치고 역시 손가락과 표정 캡쳐가 안되는데다 실시간 지원이 안 됩니다(방송 불가능)
이걸 전부 고려해 보았는데, 역시 Rokoko의 듀얼캠을 VMC내에서 구현할 수는 없을까... 라는 생각이 들었습니다. 무지 수학적이고 어렵겠지만 괜찮아요. 천문학과에서 내내 하는 게 좌표변환이거든요 일단은 도전을 해 보았습니다.
3. OSC 프로토콜
따로 3D 관련 지식이 있어야 하느냐? 아닐 거라고 생각했습니다. VMCP로 수치 데이터만 전송하면 되는 거잖아요? 그래서 VMCP 를 알아보았습니다. 홈페이지에 들어가서 자료를 찾아봤어요. 일단 예제가 있어야 이해하기 쉬우니 예제를 눌러봤습니다.
....? cs...? 처음보는 확장자인데.....?
.....C# 이다 끼야악!!!!!
아무튼 이런 이유로 저는 혹시 다른 언어로 작성된 예제 스크립트가 있는지 알아보았습니다.
파이썬 버전이 있길래 부랴부랴 실행해봤습니다. colab에서는 잘 실행되지만 colab 특성상 포트가 안 열리고, 로컬에서는 왠지 모듈 불러오는 데서부터 에러가 났습니다. 근데 뭘 어떻게 고쳐야 하는건지 잘 몰랐습니다.
저는 제가 python을 나름 할 줄 안다고 생각했는데 아니었나 봅니다. 여러분, 연구-코딩은 개발이 아닙니다. 아셨죠? >.0
익숙한 Node.js 모듈은 없나 찾아봤습니다. 어... VMC와 관련된 노드 모듈은 없었습니다. 절망하던 도중 저는 VMCP 홈페이지의 그림을 찬찬히 살펴보고서야 답을 얻었습니다!
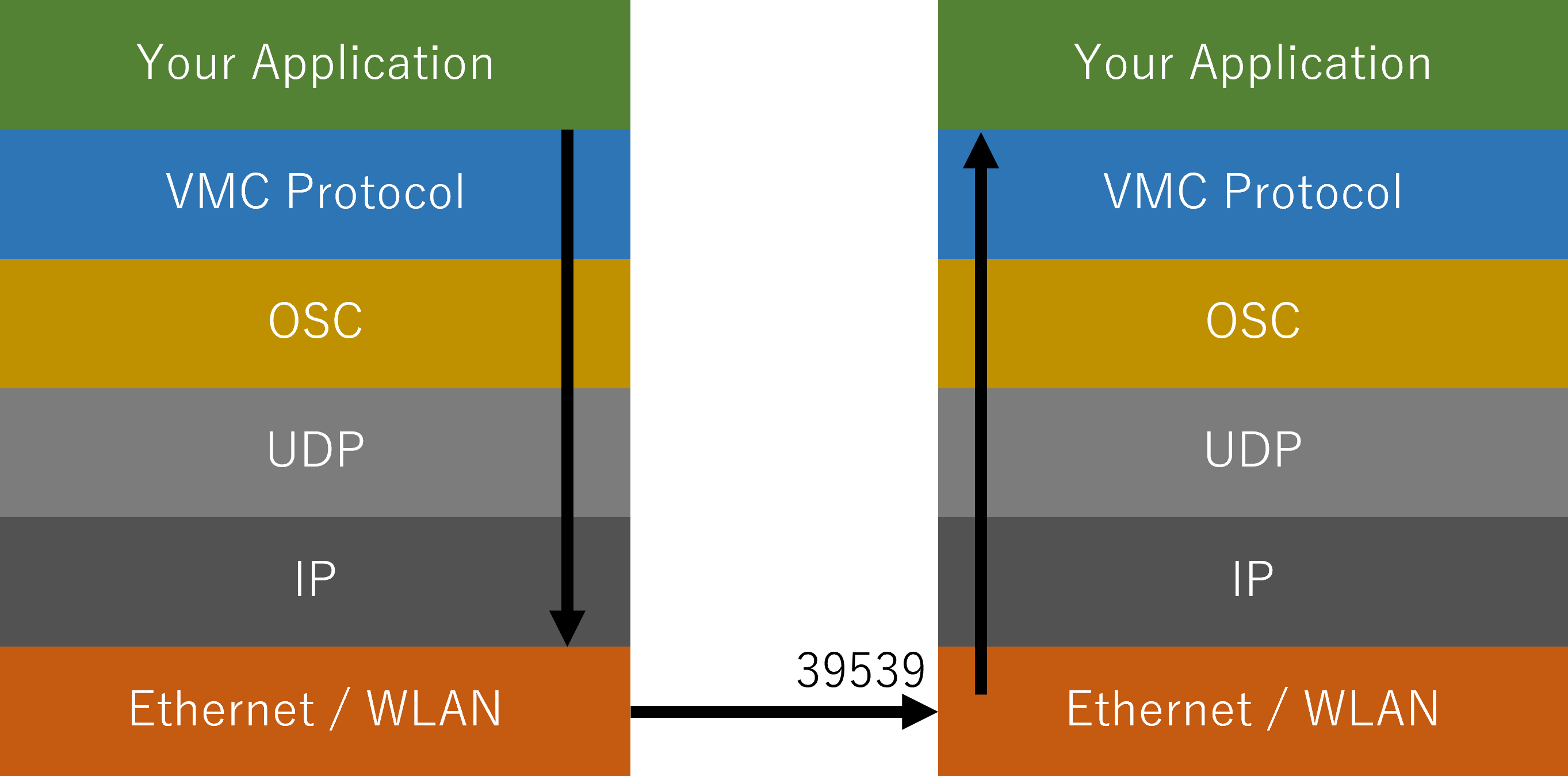
위 이미지들에서 보시다시피 OSC라는 프로토콜 상에서 사용할 수 있습니다. 그러니 OSC 프로토콜을 Node로 구현하면 VMC도 당연히 수신하고 송신할 수 있다!!! 라는 결론에 이르러서 OSC 모듈을 찾아봤습니다. osc-js와 osc.js 두 종류가 있더라구요. 둘 다 깔아봤는데 제가 성공한 버전은 후자 쪽입니다.
4. 단순 토스 서버 만들기
처음이니까, Webcam Motion Capture(39539)의 데이터를 Blender(39538)로 보내주는 코드를 짜보도록 합시다.
npm init
으로 적당히 셋팅해줍니다. 시작은 index.js로 되어있는데 저는 app.js로 변경해서 셋팅했습니다.
//app.js
const osc = require('osc')
var getIPAddresses = function () {
var os = require("os"),
interfaces = os.networkInterfaces(),
ipAddresses = [];
for (var deviceName in interfaces) {
var addresses = interfaces[deviceName];
for (var i = 0; i < addresses.length; i++) {
var addressInfo = addresses[i];
if (addressInfo.family === "IPv4" && !addressInfo.internal) {
ipAddresses.push(addressInfo.address);
}
}
}
return ipAddresses;
};
// VMC 데이터를 수신하는 포트
var udpPort = new osc.UDPPort({
localAddress: "127.0.0.1",
localPort: 39539 // ← webcam motion capture
});
// VMC 데이터를 송신하는 포트. localPort가 아니라 remotePort입니다.
var sendPort = new osc.UDPPort({
localAddress: "127.0.0.1",
remotePort: 39538 // ← blender
});
// 우선 송신부부터 열어줍니다.
sendPort.open();
// 수신 포트가 열리면 다음과 같이 콘솔을 찍습니다.
udpPort.on("ready", function () {
var ipAddresses = getIPAddresses();
console.log("Listening for OSC over UDP.");
ipAddresses.forEach(function (address) {
console.log(" Host:", address + ", Port:", udpPort.options.localPort);
});
});
// 송신 포트가 열리면 본격적으로 내용을 실행합니다.
sendPort.on("ready", function () {
var ipAddresses = getIPAddresses();
console.log("Listening for OSC over UDP.");
ipAddresses.forEach(function (address) {
console.log(" Host:", address + ", Port:", sendPort.options.localPort);
});
udpPort.on("message", function (oscMessage) {
// 수신한 message를 바탕으로 적당히 가공한 뒤
// 송신하는 코드를 여기에 작성합니다. 예를 들면
sendPort.send(oscMessage)
});
// 에러 처리... 이건 수신부에 대해서만 입니다.
udpPort.on("error", function (err) {
console.log(err);
});
// 수신부 포트를 열어줍니다.
udpPort.open();
})
이렇게 한 후,
node app.js
로 실행하면 webcam motion capture의 데이터가 블렌더로 잘 전송됩니다.
네. 이게 VMC프로토콜의 전부....
는 아니죠, 아직 안을 안 까봤잖아요.
5. 여러 신호의 평균을 내 주는 서버 만들기
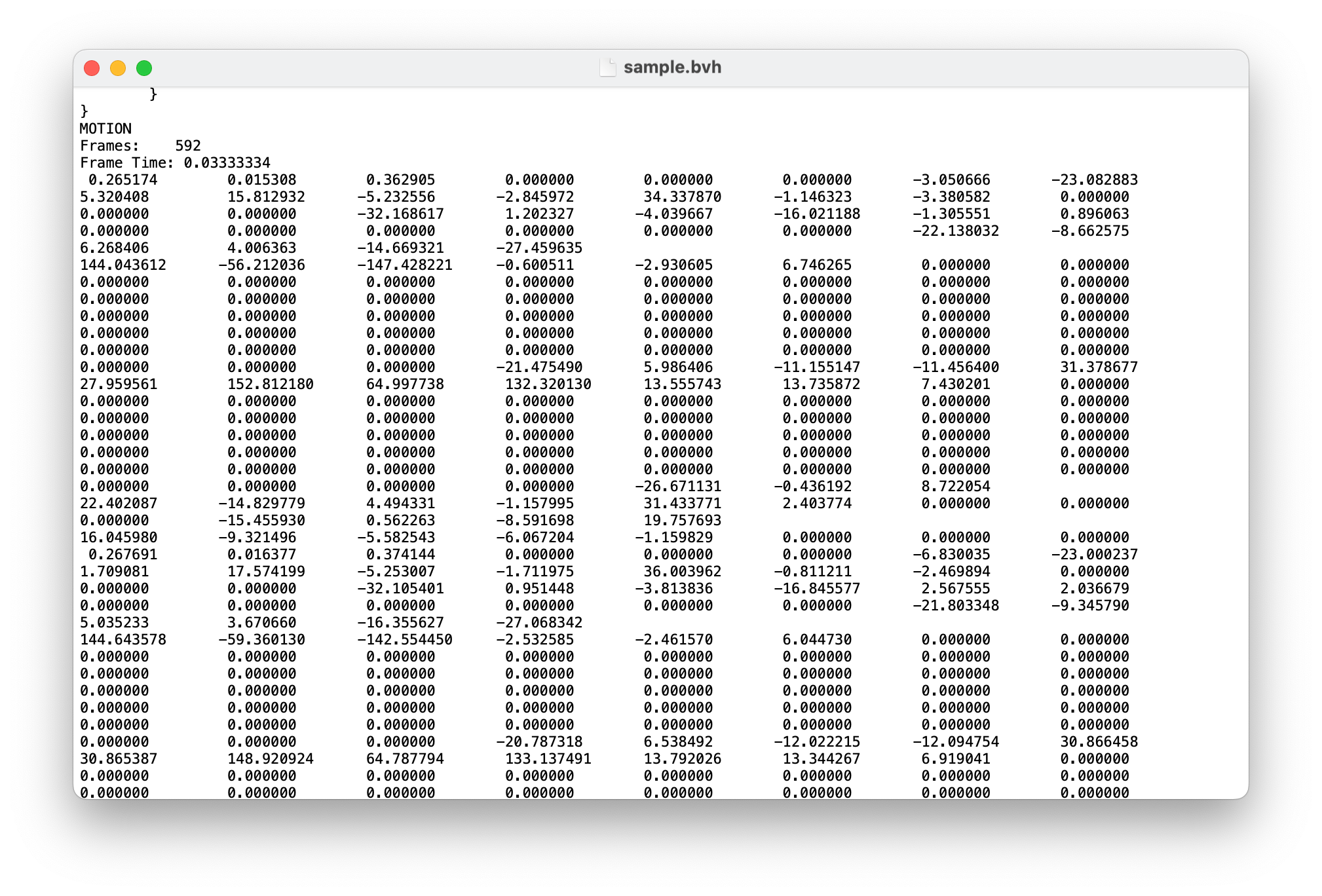
우선 저는, Webcam Motion Capture와 TDPT의 신호를 말 그대로 섞을 겁니다. 프레임률은 꽤 떨어지겠지만 특정 시간단위마다 신호들을 모아서 평균을 낸 다음 Blender로 전송하고자 합니다. 그러기 위해서는 VMC 프로토콜 안의 신호가 어떻게 생겼는지 봐야 합니다.
udpPort.on("message", function (oscMessage) {
// 수신한 message를 바탕으로 적당히 가공한 뒤
// 송신하는 코드를 여기에 작성합니다. 예를 들면
sendPort.send(oscMessage)
});
여기 코드를
udpPort.on("message", function (oscMessage) {
// 수신한 message를 바탕으로 적당히 가공한 뒤
// 송신하는 코드를 여기에 작성합니다. 예를 들면
console.log(oscMessage)
});
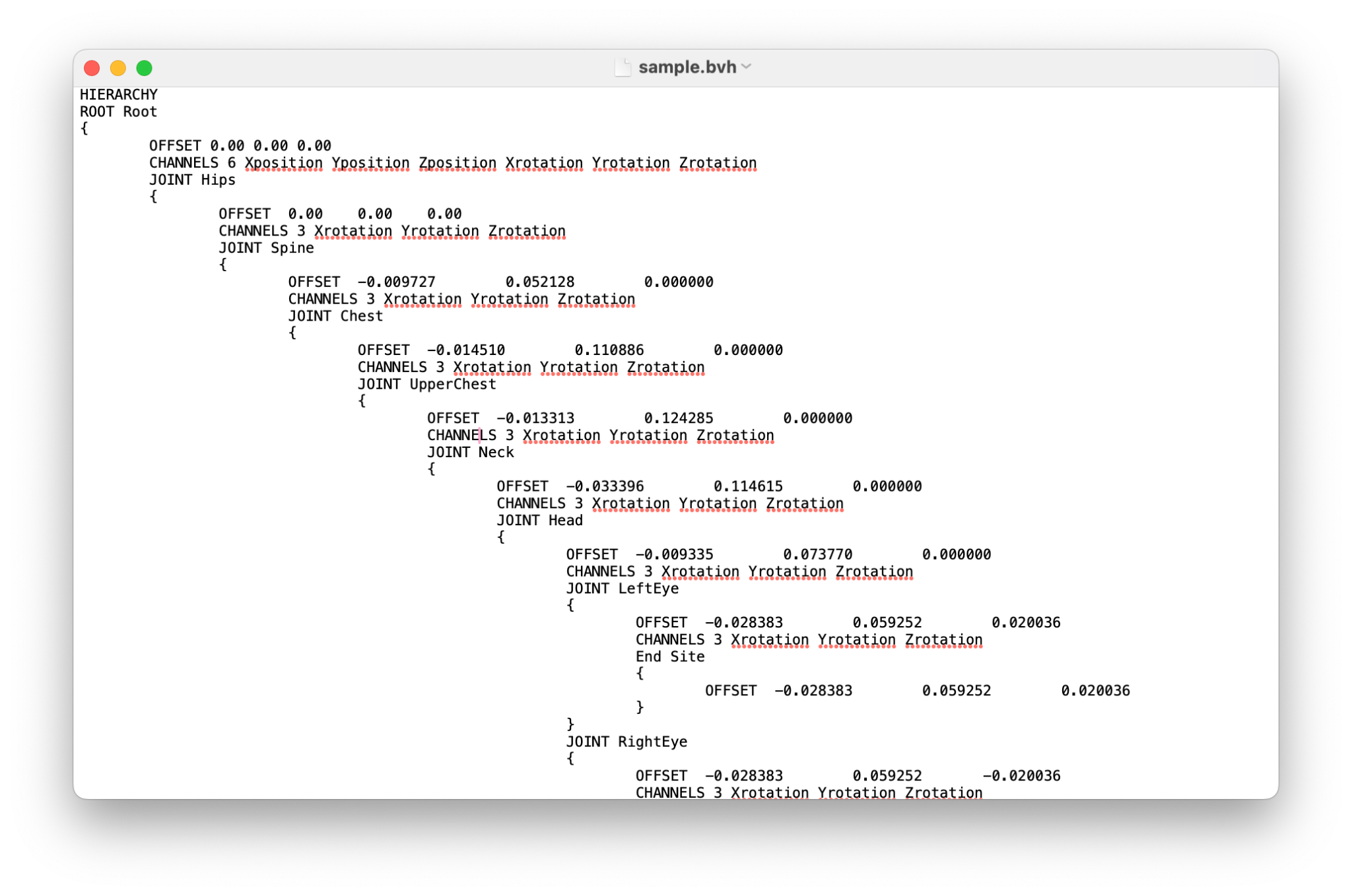
로 변경하면, 어떤 형태의 데이터가 들어오는지 알 수 있게 됩니다. 일단 표정 신호는 섞을 수 없으니, 포즈 데이터에 해당하는 '/VMC/Ext/Bone/Pos' 만을 보여드릴게요.
{
address: '/VMC/Ext/Bone/Pos',
args: [
'Head',
-4.18985948158479e-8,
0.0694720596075058,
0.008954105898737907,
-4.593485614010968e-22,
1.7898570958666765e-22,
5.895302718405536e-23,
1
]
}
다행히도 아주 편리한 JSON 데이터입니다. 처리하기 매우 쉽죠.
포즈 데이터는 무조건 address '/VMC/Ext/Bone/Pos' 쪽으로 들어옵니다. 어떤 본에 해당하는 데이터인지는 args에 적혀 있는데, args의 index 0에 그 문자열이 찍힙니다. 나머지 7개의 데이터는, 위치 X, Y, Z, 사원수 X, Y, Z, W 입니다.
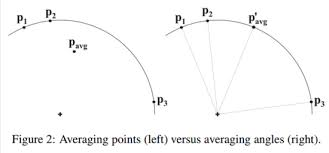
이 데이터를 운용하는 방식은 저도 공부를 해 보고 나중에 적어보겠습니다만, 적어도 여기서 해볼 신호의 평균값을 내는 데에는 무리가 없을 것 같습니다. 왜냐? float 데이터 니까요...
저는 일단 시험 삼아, 'Spine', 'Chest', 'Neck', 'Head' 네 개의 데이터만을 처리해 보았습니다.
우선 함수를 하나 만들 겁니다. 이 함수는 몇 밀리초간 받아서 축적해온 데이터들의 Array의, 딱 평균값에 해당하는 Array를 계산하여 반환..하지는 않고 바로 블렌더 측에 전송하는 함수입니다.
// 데이터의 평균을 내 주는 함수입니다.
// part는 문자열('Head' 같은),
// receiveArray는 그동안 받아서 축적해온 데이터들의 Array 입니다.
// 참고로 receiveArray에는 part의 이름이 없습니다. slice(1) 로 뺄겁니다.
function averager(part, receiveArray) {
if (receiveArray.length > 0) {
var result3 = [part]
//result3 는 내보낼 args 데이터 입니다.
for(var i = 0; i < receiveArray[0].length; i++){
var num = 0;
for(var j = 0; j < receiveArray.length; j++){
num += receiveArray[j][i];
}
result3.push(num / receiveArray.length)
// 앞의 array의 내용물을 index별로 평균내서
// result3에 집어넣어줍니다.
}
//송신부
sendPort.send({
address: '/VMC/Ext/Bone/Pos',
args: result3
})
// 어떤 데이터가 나가고 있는지 찍고 싶으면 찍으세요..
// console.log({
// address: '/VMC/Ext/Bone/Pos',
// args: result3
// })
}
}
그리고 Array들이랑 변수들을 선언했습니다.
var triggered = false
var receive = false
var receiveSpineArray = []
var receiveChestArray = []
var receiveNeckArray = []
var receiveHeadArray = []
receive가 false가 되면 수신을 중단하고 지금까지 받았던 내용들의 평균을 계산해서 보낼 것입니다. 그리고 receive는 (일단 테스트니까) 450ms째에 false가 되고, 50ms째에 true가 되는 것을 게속 반복할 것입니다.
그리고 그 트리거가 되는 것은 첫번째 데이터의 수신입니다.
udpPort.on("message", function (oscMessage) {
// triggered가 false일 경우 트리거를 당겨줄겁니다.
if (!triggered) {
setInterval(() => {
receive = true
setTimeout(() => {
receive = false
}, 450);
}, 500)
// 500밀리초 간격으로 true와 false를 반복해서 실행.
}
triggered = true
if (oscMessage.address == '/VMC/Ext/Bone/Pos') {
if (oscMessage.args[0] == 'Spine') {
if (receive == true) {
receiveSpineArray.push(oscMessage.args.slice(1))
// receive가 true라면 args에서 앞의 'Spine' 부분을 자르고 push합니다.
// 계산을 용이하게 하기 위해서 입니다.
} else if (receive == false) {
averager('Spine', receiveSpineArray)
receiveSpineArray = []
// receive가 false라면 지금까지 받았던 array의 평균값을 계산하고,
// 블렌더로 데이터를 보냅니다.
// 그리고 기존 array를 초기화 합니다.
}
//아래는 부위만 다르고 동일합니다.
} else if (oscMessage.args[0] == 'Chest') {
if (receive == true) {
receiveChestArray.push(oscMessage.args.slice(1))
} else if (receive == false) {
averager('Chest', receiveChestArray)
receiveChestArray = []
}
} else if (oscMessage.args[0] == 'Neck') {
if (receive == true) {
receiveNeckArray.push(oscMessage.args.slice(1))
} else if (receive == false) {
averager('Neck', receiveNeckArray)
receiveNeckArray = []
}
} else if (oscMessage.args[0] == 'Head') {
if (receive == true) {
receiveHeadArray.push(oscMessage.args.slice(1))
} else if (receive == false) {
averager('Head', receiveHeadArray)
receiveHeadArray = []
}
}
}
});

저장하고 실행해 보면 블렌더 상에서 움직이는 아바타를 보실 수 있습니다. 일단 후기 말씀드릴게요.
웹 서버 여는것보다 쉬운것같아요!